RC.ПЕРМЬ.РУ > Клуб FPV
Полетушки
<< < (792/945) > >>
Ilya:
--- Цитата: emax от 19 Сентября 2016, 23:16:26 ---Нормально, сколько не вглядывался, так и не нашел на земле оператора и точку старта. Или "специально" не попал в кадр. Как приблуда - телефот, работает?
--- Конец цитаты ---
Взлетал от памятника-парового молота, с горы короче.
Телефот с зумом работает, на большом 3х осевом подвесе.
Пока и к сожаленью на фотокоптер не расклонирован.
emax:
--- Цитата: Ilya от 19 Сентября 2016, 23:26:09 ---Взлетал от памятника-парового молота, с горы короче.
--- Конец цитаты ---
Интересно, сколько там перепад высот и как ведет себя автопилот при отрицательной высоте? Домой возвращается по прямой? :D Или в авто режимах летать при таком рельефе нельзя?
Ilya:
--- Цитата: emax от 20 Сентября 2016, 21:15:33 ---
Интересно, сколько там перепад высот и как ведет себя автопилот при отрицательной высоте? Домой возвращается по прямой? :D Или в авто режимах летать при таком рельефе нельзя?
--- Конец цитаты ---
В минус десяток метров уходил, ничего страшного в этом нет. Летали и в минус 70, но это близко к рекорду.
А возвращается любой ардупилот по прямой к заданной по высоте точке над местом взлета, если чего.
emax:
--- Цитата: Ilya от 20 Сентября 2016, 21:29:07 ---А возвращается любой ардупилот по прямой к заданной по высоте точке над местом взлета, если чего.
--- Конец цитаты ---
У нас коптер летит до дому сохраняя эшелон, а потом вертикально снижается. То есть при отрицательной высоте он тоже полетит сохраняя эшелон?
Ilya:
--- Цитата: emax от 20 Сентября 2016, 21:50:45 ---
У нас коптер летит до дому сохраняя эшелон, а потом вертикально снижается. То есть при отрицательной высоте он тоже полетит сохраняя эшелон?
--- Конец цитаты ---
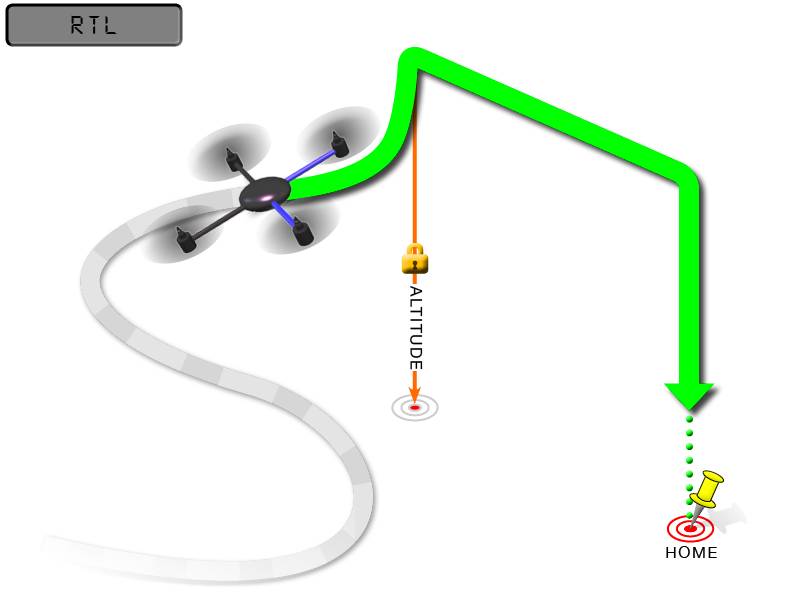
Алгоритм возврата домой следующий.
1а. Если высота менее заданной RTL_ALT, то коптер сначала набирает ее.
Летит домой по прямой до точки на высоте RTL_ALT над местом старта.
1б. Если высота выше заданной, то коптер летит по прямой от текущей точки до точки на высоте RTL_ALT над местом старта.
3. Затем идут Задержка RTL_LOIT_TIME, снижение с максимальной скоростью снижения WPNAV_SPEED_DN (бывает страшно) до высоты RTL_ALT_FINAL (вроде бы) и собственно посадка до земли со скоростью LAND_SPEED.
Ну и вообще теория тут
http://ardupilot.org/copter/docs/rtl-mode.html
Навигация
[0] Главная страница сообщений
[#] Следующая страница
[*] Предыдущая страница
Перейти к полной версии