RC.ПЕРМЬ.РУ > Клуб FPV
Региональная комиссия МАК. Скандалы, интриги, расследования.
<< < (53/66) > >>
master.x:
--- Цитата: scales11 от 23 Мая 2017, 17:55:36 --- к тому датчик перед вылетом не отколибровал
--- Конец цитаты ---
Гы! а не знаю ты в курсе что датчик воздушной скорости сам калибруется, в процессе первичных полётов? И только потом включают контроль по нему. там два режима вкл. датчик и вкл. контроль айрспид. всяка разна дуть в трубку пито категорически нельзя.
Добавлено 23 Мая 2017, 22:46:43
--- Цитата: scales11 от 23 Мая 2017, 17:55:36 ---Если подскажете- респект и уважуха. У меня еще осложняется все тем, что не Mission planner на windows, а APM Planner на MAC. ПО-моему чуток по другому параметры называются.
--- Конец цитаты ---
Не знаю как на мак, но на вин все параметры с комментариями, cruis spd это скорость в круиз режиме всё остальное где то рядом. микширование скорости типа GPS airspeed баланс между 1-0. ставь 0.5 НО перед этим датчик скорости точно должен быть откалиброван.
Ilya:
Что нужно сделать.
1. Убедиться что датчик воздушной скорости используется для навигации и управления двигателем.
ARSPD_USE=1
Если нет, тогда сваливание при полете в попутном ветре закономерно. Если да, то копать дальше
2. Провести калибровку датчика воздушной скорости. Для этого выставить параметр (желательно непосдрественно перед взлетом, или вообще в воздухе).
ARSPD_AUTOCAL
Затем, после полетов по кругу в течение 5-10 минут параметр выключить.
3. Проверить параметры скорости в круиз режимах согласно
http://ardupilot.org/plane/docs/airspeed.html
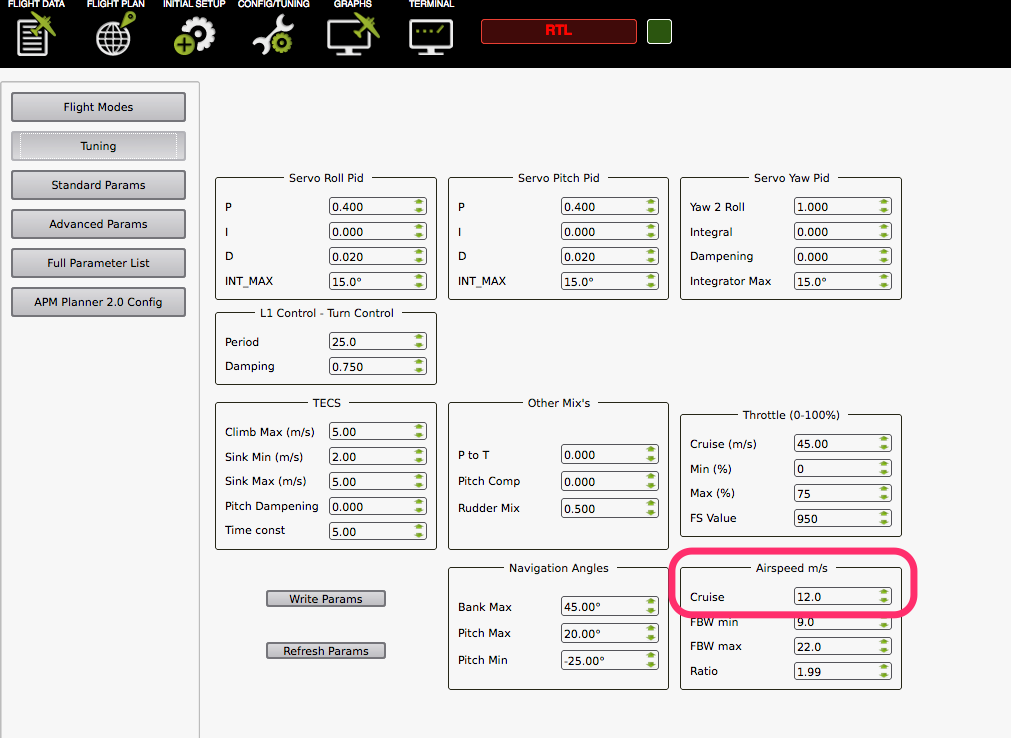
Минимальная скорость для твоего ЛК должна быть в районе 15 м/с (заведомо выше скорости сваливаниия), максимальная пусть будет 30 м/с.
argut:
--- Цитата: scales11 от 23 Мая 2017, 17:55:36 ---Если подскажете- респект и уважуха.
--- Конец цитаты ---
Вот это точно: ARSPD_USE,0
Остальное не помню :)
Вот на всякий случай мои параметры: https://yadi.sk/d/i2g5nMKVrUhXm
Посмотрел в них:
THR_MAX,80
THR_MIN,0
Но летает нормально. Не падает. Левым стиком в режиме круиза регулируется. В эквиваленте воздушной скорости выходит около 40 км/ч в нижнем положении. около 80 км/ч в верхнем.
Добавлено 23 Мая 2017, 22:50:41
--- Цитата: Ilya от 23 Мая 2017, 22:48:55 ---1. Убедиться что датчик воздушной скорости используется для навигации и управления двигателем.
ARSPD_USE=1
--- Конец цитаты ---
У меня как раз отключен нахрен, исходя из того что айрспид вдруг не работает
Андрей197:
Еще есть такой параметр как минимальная скорость движения по GPS см/сек. MIN_GNDSPD_CM я ставлю 278 это примерно 10км/ч. можно и больше.
master.x:
--- Цитата: scales11 от 22 Мая 2017, 23:09:46 ---Произошло небольшое ЧП. Все живы, посадка нормальная. Только пилот обосрался.
Че такое произошло так и не понял. Есть мысли?
--- Конец цитаты ---
А почему никто не задался вопросом как машина вышла из штопора? Что скажет пилот? на ОСД я видел переключение в режим РТЛ. Но он сам этого сделать не мог. или повезло?
Навигация
[0] Главная страница сообщений
[#] Следующая страница
[*] Предыдущая страница
Перейти к полной версии