Ардулет не забросил, нет. После задержки, связанной в т.ч. с А2 коптером, принялся за коптер.
На сей момент пришла рама от RCTimer, на которой куча места для всего.
На ней и собрал аппарат.


Рама понятно какая.
Движки
RCTImer BC3530-14 1100KVВинты 11x5 карбон
Вес всего - под 2 кг, включая балласт (вместо видео).
Батарейка пока одна 3s 4000mah
Сегодня первый раз облетал на улице. Пиды выставил такие (после одно легкого оверкиля на P ~ 0,1000):
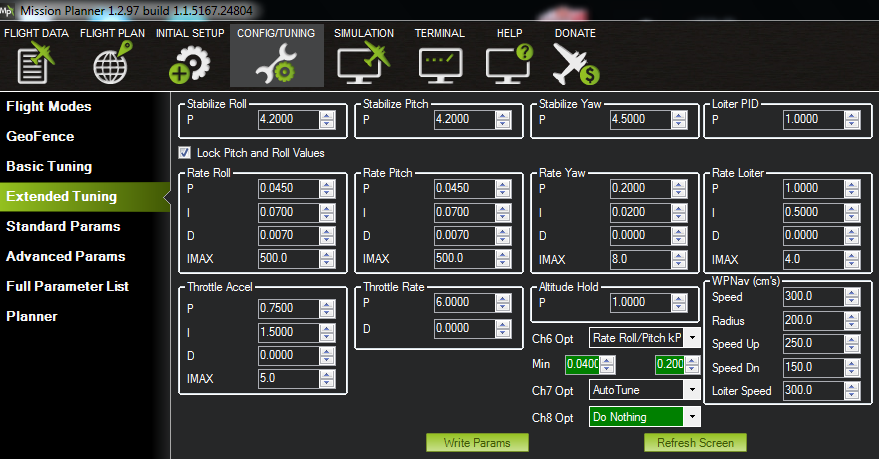
Юра, если есть предположения, как улучшить вручную, то подскажи.
Стабильность, после Назы - так себе (но лучше чем у FY41 на порядок), аппарат куда-то и постоянно дергается по 2 осям, однако в Loiter режиме висит вполне четко, даже радиус разворота 360 меньше полуметра, что круче той же Назы.
Управление в Loiter режиме вялое. В Stabilize и AltHold - более-менее. В Stabilize взлетает процентах на 30 - запас мощи огромный.
Нужно настраивать пиды, учу
мануал про AutoTune. Рядом с домом проводить обучение страшно.

 Тема: Коптер на АРМ (Прочитано 101609 раз)
Тема: Коптер на АРМ (Прочитано 101609 раз)