RC.ПЕРМЬ.РУ > Клуб FPV
FPV и мультикоптеры
<< < (46/68) > >>
Stannoid:
--- Цитата: master.x от 23 Октября 2013, 08:25:04 ---ставить свитч это лишнее, есть на много проще вариант, смикшировать на один из каналов тумблер
--- Конец цитаты ---
ничего не понял какой тумблер смекшировать, свитч итак на канале сидит и с апы нагрузку расцепляет и подключает, с отдельного канала. Я про этот RC - Switch толковал. http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=8833
Тумблером в полете не разомкнуть цепь надо приближаться и тянуться к коптеру.
master.x:
--- Цитата: Stannoid от 23 Октября 2013, 09:07:12 ---ничего не понял какой тумблер смекшировать, свитч итак на канале сидит и с апы нагрузку расцепляет и подключает, с отдельного канала. Я про этот RC - Switch толковал. http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=8833
Тумблером в полете не разомкнуть цепь надо приближаться и тянуться к коптеру.
--- Конец цитаты ---
на любой апе можно запрограммировать канал или группу каналов на определённые действия. а именно в данной ситуации отключение моторчика, можно группы моторчиков. прелесть данного метода в том что за один раз в любой момент можно моделировать любую ситуацию, отказы двигателей в разной последовательности в комбинации с разными тумблерами, и одно из главных дёшево-сердито, а если моделировать серию отказов например отказал один затем другой на против или на искосок, верхний или нижний. вот насколько ума и фантазии хватит. Может не так и просто но даже на стандартном варианте моей апы реализуемо. просто надо покапаться в настройках или обратиться к мануалу.
Добавлено: 23 Октября 2013, 12:53:41ну вот на вскидку микшер флаперонов.
Добавлено: 23 Октября 2013, 12:57:32конечно свитч это проще, но гибкости не будет. моделирование ситуаций заканчиватся на количестве свитчей.
Добавлено: 23 Октября 2013, 13:04:39или например программируемые микшеры. у меня их 3. это всё на вскидку. надо мануал курить и народ поспрашивать для простоты решения вопроса, может кто делал уже подобное.
LysvaSki:
--- Цитата: master.x от 23 Октября 2013, 12:51:53 ---на любой апе можно запрограммировать канал или группу каналов на определённые действия.
--- Конец цитаты ---
аппа сама по себе не рулит каждым из 4/6/8 моторов коптера. она только передаёт команды полётному контролеру через приёмник р/у. а дальше уже контроллер, в зависимости от ситуации, говорит какому двигу как крутиться.
с аппы этого никак не сделать. если только у контроллера того есть управляющий канал для подобных команд.
master.x:
--- Цитата: LysvaSki от 23 Октября 2013, 16:09:20 ---аппа сама по себе не рулит каждым из 4/6/8 моторов коптера. она только передаёт команды полётному контролеру через приёмник р/у. а дальше уже контроллер, в зависимости от ситуации, говорит какому двигу как крутиться.
с аппы этого никак не сделать. если только у контроллера того есть управляющий канал для подобных команд.
--- Конец цитаты ---
блин точно. там же стабилизация вмешивается. тогда ни как, такое возможно смоделировать только на APM если код подправить.
Ilya:
Кажись, нашел сбоя и последующего краша коптера.
Вот она:

Как обычно, виноваты разъемы. Сразу же заметил, что GPS разъем очень слабо держится в PMU, поэтому на всякий случай закрепил термоклеем, однако сами контакты могли и не иметь хороших контактов.
Основная версия проишествия следующая:
После набора высоты отпадывает один из контактов GPS-PMU. Коптер летел в GPS режиме, и соответственно теряет удержание позиции.
Затем GPS включается, и ловит ближайшую точку -над трассой в ~100-150 метрах от текущей позиции (высота сохраняется, поскольку учитывается бародатчиком).
Наза летит срочно в точку, типа сохраняя позицию, скрываясь за деревьями, по дороге теряя связь с пультом как по видео, так и по каналу управления, переходя в режим Failsafe
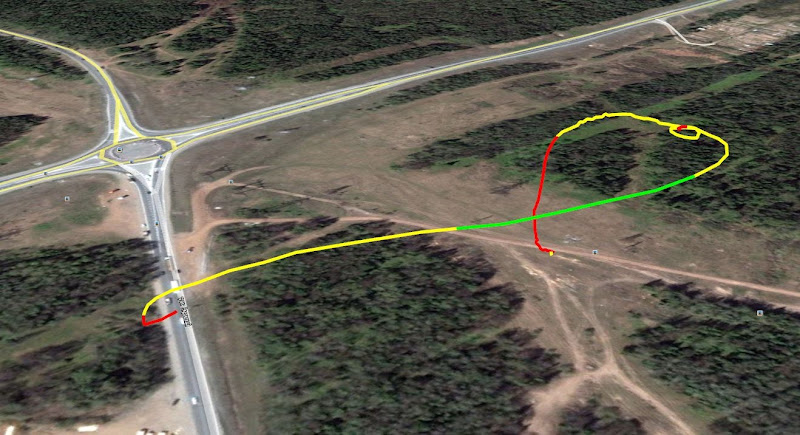
Поскольку GPS был выключен а потом включен из-за разъема, то (предполагаю, но желательно и проверить что будет если в полете выключить-включить GPS) пойманная позиция, к которой аппарат стремился установлена как домашняя точка. В режиме FailSafe Наза честно довела аппарат до "дома", в 100 метрах от земли прямо над трассой, где он и завис на несколько минут, потихоньку снижаясь. Затем топливо закончилось, и быстро снижающийся аппарат ветром аппарат унесло до опушки леса.
Дальше коптер пролежал почти двое суток и был подобран вором-грибником.
Навигация
[0] Главная страница сообщений
[#] Следующая страница
[*] Предыдущая страница
Перейти к полной версии